Yüksek çözünürlük ve doğruluk, ters mühendislik ve ölçüm için çoğu endüstriyel uygulamanın ihtiyaçlarını karşılar.
Minimum nokta mesafesi 0.05mm
Lazer tarama altında 0.04 mm'ye kadar doğruluk
Üç boyutlu tarama tersine mühendislik, genellikle bir nesnenin veya bir ortamın üç boyutlu modelini oluşturmak için kullanılan bir teknoloji ve süreçtir. Bu süreç, bir nesnenin ya da alanın fiziksel özelliklerini, şeklini ve yüzeyini üç boyutlu bir dijital model haline getirmeyi içerir. Bu model daha sonra bilgisayar destekli tasarım (CAD) yazılımında kullanılabilir ve analiz edilebilir.
Tersine mühendislik, genellikle mevcut bir nesnenin veya sistemin çalışma prensiplerini anlamak, iyileştirmek, yeniden tasarlamak veya replike etmek amacıyla kullanılır. Üç boyutlu tarama, bu süreci desteklemek için kullanılan önemli bir araçtır.
Üç boyutlu tarama tersine mühendislik süreci genellikle şu adımları içerir:
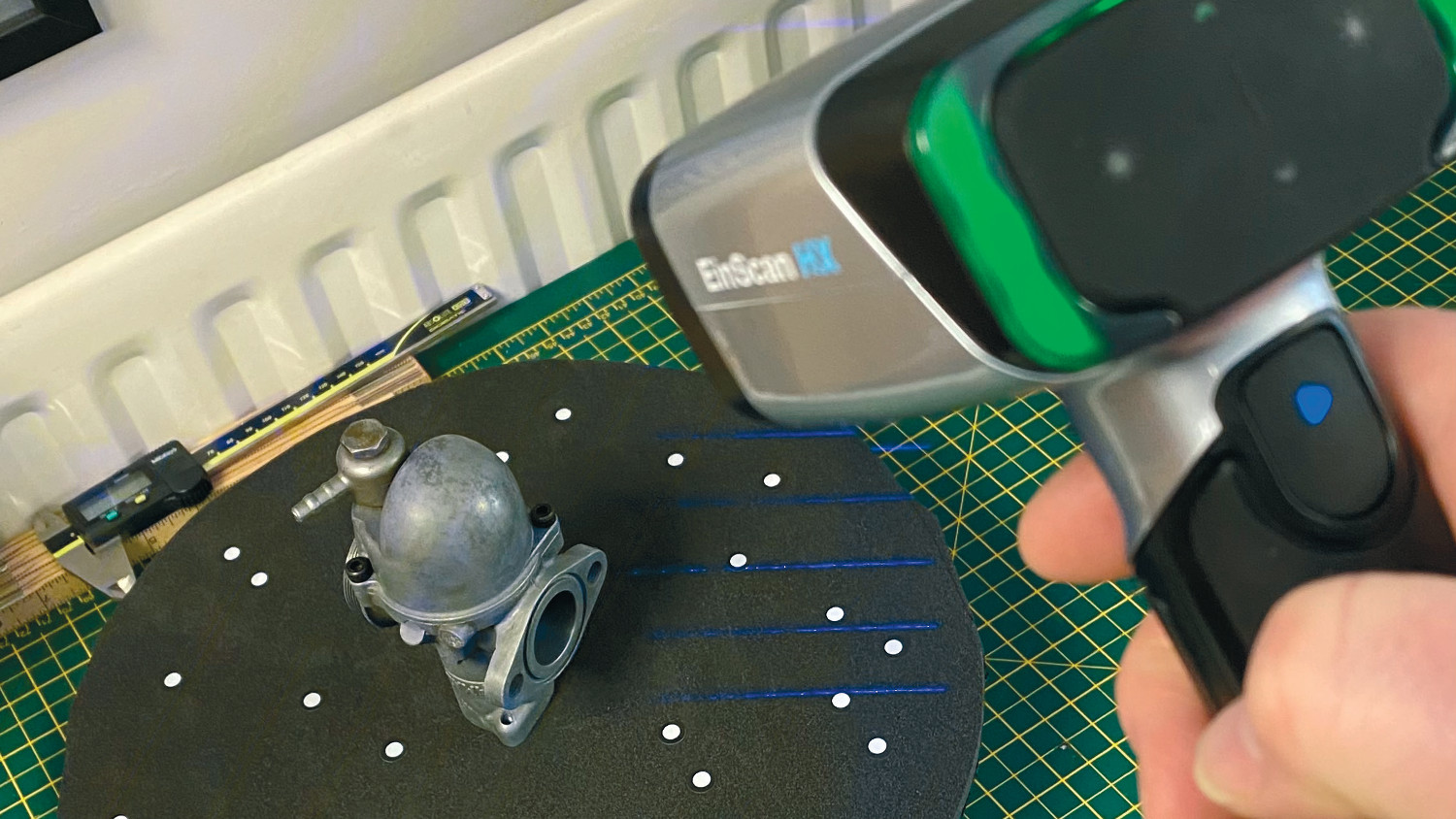
1. **Tarama:**
- Nesnenin ya da alanın yüzeyini tarayan bir 3D tarayıcı kullanılır. Bu tarayıcı, lazer ışını, dokunmatik sensörler veya diğer teknolojileri kullanarak nesnenin veya ortamın detaylı bir dijital modelini oluşturur.
2. **Veri İşleme:**
- Elde edilen tarama verileri, bir bilgisayar programı aracılığıyla işlenir. Gürültüleri temizlemek, veriyi düzenlemek ve olası hataları düzeltmek için bu aşamada çeşitli filtreleme ve düzeltme işlemleri gerçekleştirilir.
3. **Nokta Bulutu Oluşturma:**
- Tarama sonucunda elde edilen veriler genellikle bir nokta bulutu olarak adlandırılır. Bu, nesnenin veya ortamın yüzeyini temsil eden bir dizi 3D koordinat noktasından oluşur.
4. **3D Modelleme:**
- Nokta bulutu, CAD yazılımı gibi araçlar kullanılarak bir üç boyutlu model haline getirilir. Modelleme süreci, yüzeyleri oluşturma, detayları ekleyerek iyileştirme ve tasarımın gereksinimlerini karşılamak için çeşitli düzenleme işlemlerini içerir.
5. **Analiz ve Tasarım:**
- Oluşturulan 3D model, analiz ve tasarım amaçları için kullanılabilir. Mühendisler, nesnenin özelliklerini inceleyebilir, gerektiğinde tasarım değişiklikleri yapabilir veya nesnenin işlevselliğini anlamak için simülasyonlar gerçekleştirebilir.
Bu süreç, özellikle tasarım, kalite kontrolü, prototip oluşturma ve mevcut nesnelerin iyileştirilmesi gibi birçok uygulama alanında kullanılır.
|
Mode |
Laser scan |
Rapid scan |
|
Light source |
Laser |
LED |
|
Accuracy |
Up to 0.04 mm |
Up to 0.05 mm |
|
Scan speed |
Up to 480,000 points/s (55 FPS) |
Up to 1,200,000 points/s (20 FPS) |
|
Resolution |
0.05–3mm |
0.25–3mm |
|
Align modes |
Markers |
Markers, Feature, Hybrid, Texture |
|
Max. FOV |
420 x 440 mm |
380 x 400 mm |
|
Texture scan |
No |
Yes |